

數位時代下的智慧醫療

作者
蔡宏營簡介
蔡宏營為清華大學動機系特聘教授,目前為科技部固力學門召集人。曾獲得國家發明創作獎、經濟部創新技術獎、科技部傑出研究獎、清華大學新進人員研究獎、清華大學傑出教學獎、清華大學傑出導師獎等榮譽。亦獲中國機械工程學會會士、中華民國力學學會會士。研究興趣包含智慧製造、影像處理、先進加工技術、微奈米製程技術與分析、專利分析與侵權。
單位
國立清華大學文章來源
Positioning and measuring system based on Image scale, US Patent 10535157B2 基於影像尺的定位量測系統,中華民國發明專利I628415-
標籤
-
分享文章
基於國際授權條款4.0,您可免費分享此篇文章
本文介紹一套影像定位與解碼系統,包含影像處理、機器視覺和機器學習。搭配影像擷取系統與圖案設計製造,可對移動的目標物進行微米等級的定位。此影像定位與解碼系統中的「定位」乃對所設計之特殊圖案進行偵測,並找到該圖案之中心影像座標;「解碼」乃類似QR code概念,去解析該圖案之絕對座標。透過定位與解碼,即能連結圖案的影像座標與絕對座標,賦予一張影像中像素點在現實中的實際位置。此系統除具有光學尺、量測位移資訊功能外,還具備整合其他影像處理技術的優勢。因此可另結合量測物件長度的演算法,以提升整個系統的價值。
機械加工時出現工件製造的公差,對於需要二維圖面或三維模型來做引導的加工方式,會有工件尺寸和圖面尺寸不一致的問題;另一方面,工件通常是靠夾治具做機械式的定位,然而在微米級的加工條件下,普通夾治具本身的製造公差就已超過此精度,工件的取放位置都會與預期有所偏差。因此工件的實際座標位置受到取放物件產生偏差量,將影響加工精度表現。
一般影像量測方法都是在單張影像上做量測,為了可在單一視野下看到完整的物件,相機的放大倍率要小,量測精度就隨之下降;但若為了量測精度而選擇高放大倍率之鏡頭,則通常相機視野僅能看到物件的一角,為了量測超出視野範圍的物件,通常需仰賴X-Y平台的定位資訊。一般X-Y平台的定位仰賴光學尺或磁性尺,本研究所使用的方法與此兩者有別,乃透過影像定位進行X-Y平台定位,並搭配4.5倍率的鏡頭來提升影像定位精度,利用影像處理與機器視覺技術,提取待測物之特徵點進行尺寸量測(圖一)。
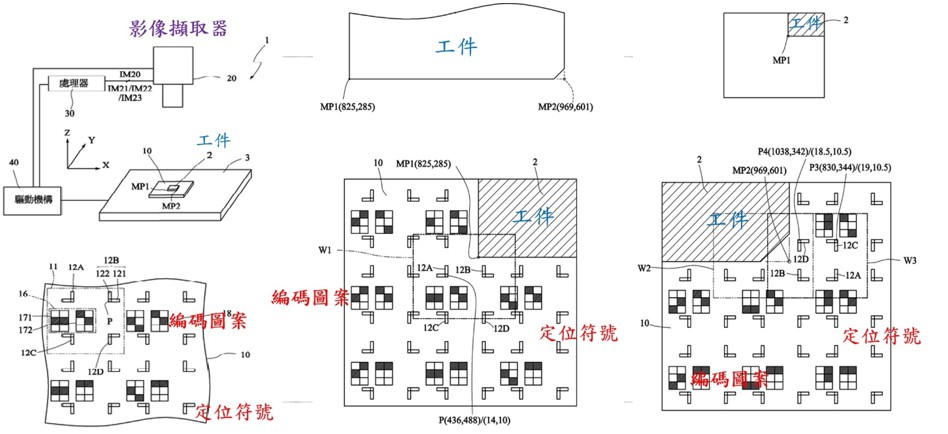
圖一:影像定位系統示意圖
研究流程主要為4大部分(圖二):(1)物件邊緣偵測(Object edge detection):由於物件的邊緣具有明顯且連續的像素強度斷層,所以使用方向梯度直方圖做為特徵,接續用移動視窗逐步地掃描整張影像,將視窗所擷取之影像特徵資訊丟入預先訓練好的支援向量機進行判讀,偵測並記錄出水平和垂直邊緣所在的位置;(2)端點偵測(Terminal point detection):將物件邊緣偵測所得到的水平和垂直邊緣影像進行霍夫線段轉換,將兩條線的交點記錄下來,得到線段端點;(3)定位符號偵測(Positioning mark detection):影像尺的圖案和原始設計圖面有些微的出入,先用陰影去除和中值濾波來得到乾淨、合適的影像,再利用定位符號的幾何特性,進行偵測;(4)解碼(Decoding):解碼的圖案和定位符號的相對位置是固定的,因此當偵測到定位符號後,即可計算相對位置上的像素點值,進行解碼動作,以得到該定位符號的影像尺座標。
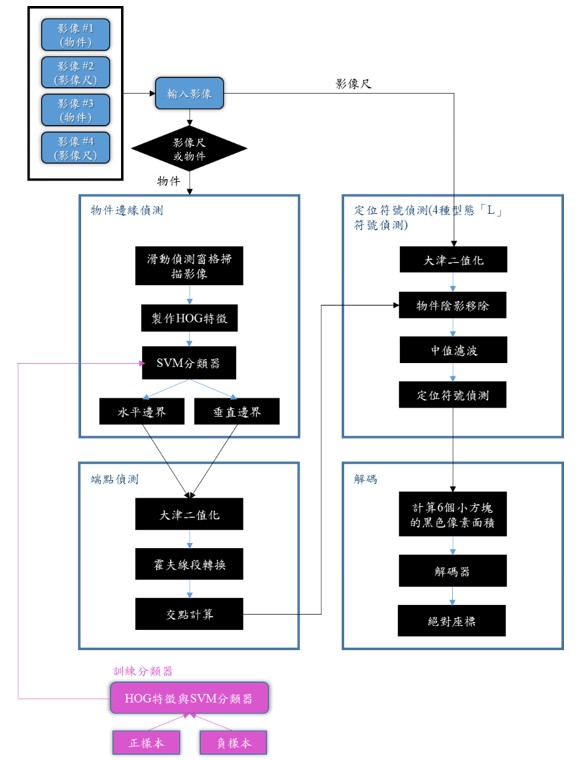
圖二:研究流程圖
為解決純影像量測物件時,量測之物件尺寸須小於相機視野大小的限制,本研究提出影像尺概念,藉由將待測物件放置在具有定位與編碼圖案的載具上,當相機在拍攝時,同時對物件與圖案進行拍攝,透過分析圖案,識別該影像中物件局部樣貌的實際位置(圖三)。因此,只要將拍攝之物件置於影像尺上,量測的物件便不再受限於相機的視野大小,也不需依靠平台的定位精度,即可進行長度量測,經實驗測試,以4 mm塊規為例,平均量測長度為4011 µm,平均誤差為11 µm。
除物件的長度量測,影像尺亦可單獨作為物體移動時的定位依據,例如透過取得「L」符號影像中像素座標,以及「L」符號的影像尺座標,即可推算影像尺相對於相機移動的距離,達到像光學尺或磁性尺的定位功能。「L」符號透過霍夫線段轉換的參數優化調整,重複量測誤差在 ± 2個像素點內。
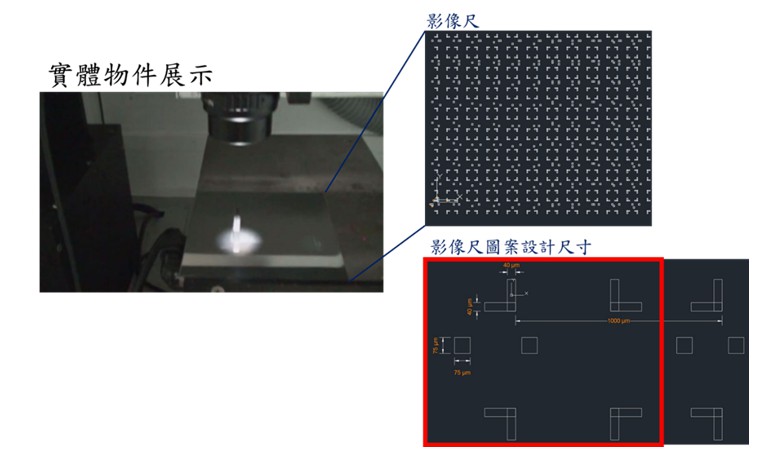
圖三:實體物件展示與影像尺圖案設計
延伸閱讀-科技部(科技大觀園)
相關文章


訂閱電子報以獲得最新資訊
填寫連絡資訊以取得每月發行之電子報